https://github.com/UmbraTek/ut_arm_ros
GitHub - UmbraTek/ut_arm_ros: umbratek utra ros devel
umbratek utra ros devel. Contribute to UmbraTek/ut_arm_ros development by creating an account on GitHub.
github.com
github를 참고해줍니다.
미리 설치해줘야 하는 것들로는
gazebo_ros_pkgs: http://gazebosim.org/tutorials?tut=ros_installing (if use Gazebo)
ros_control: http://wiki.ros.org/ros_control (remember to select your correct ROS distribution)
moveit_core: https://moveit.ros.org/install/
ros_industrial: https://github.com/ros-industrial/industrial_core(remember to select your correct ROS distribution)
등이 있습니다.
가제보, 로스 컨트롤, 무브잇 등은 ros를 설치할 때 full-desktop으로 깔면 아마 자동적으로 깔릴 거 같구요.
ros_industrial만 들어가서 catkin_ws/src에 깔아줍니다.
cd ~/catkin_ws/src
git clone https://github.com/UmbraTek/utra_ros
rosdep update
rosdep check --from-paths . --ignore-src --rosdistro melodic
rosdep install --from-paths . --ignore-src --rosdistro melodic -y
cd ~/catkin_ws
catkin_make
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc본인이 사용하는 ros 버전이 melodic이면 그대로 쓰고 아니면 자신이 사용하는 버전에 맞게 명령어를 수정해줍니다.
그리고 umbratek에서 제공하는 studio로 먼저 열어서 연결이 잘 되는지 확인을 해줘야 합니다.
연결하는 방법은
NTRO 컨트롤러와 컴퓨터를 랜선으로 연결해주고,
이더넷 연결 바로 옆에 E-STOP과 GND단자를 연결해줍니다. (중요. 안 그럼 안 켜짐)

그리고 컨트롤러의 IP를 확인한 뒤 유선 연결 설정 → IPv4 → Manual
주소는 컨트롤러 주소에서 맨마지막 숫자만 하나 다르게, Netmask는 255.255.255.0으로 설정해줍니다.

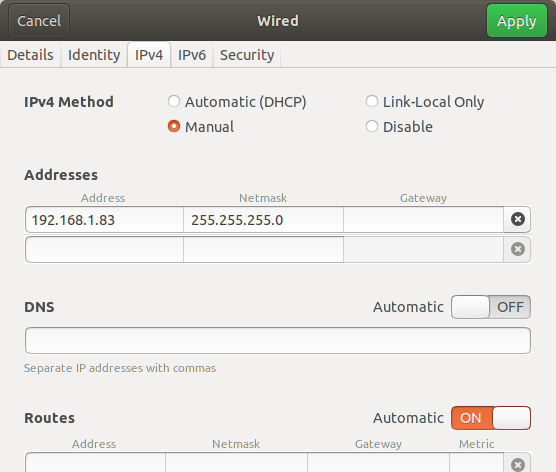
그러고 컨트롤러에 나와있는 IP주소를 인터넷 주소 입력하는 곳에 넣어주면
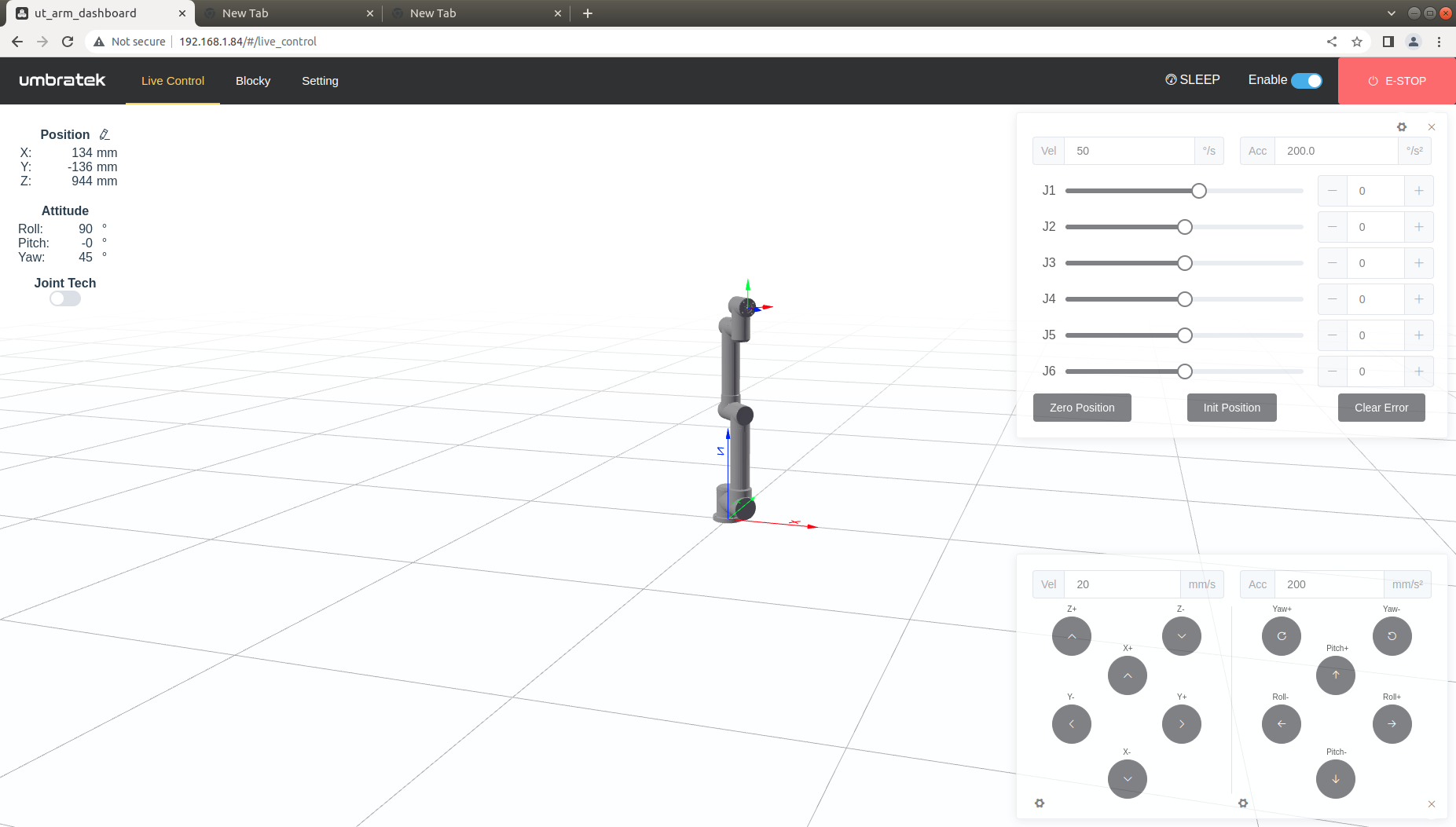
이렇게 나올 겁니다.
혹시 연결이 안 되시는 분은
1. Window에서 먼저 연결해 보고 리눅스로 넘어오거나
2. Chrome 같은 다른 웹 브라우저를 사용해보는 것을 추천드립니다.
studio로 연결이 잘 되는 것을 확인했으면
이제 ROS로 켜보겠습니다.
roslaunch arm_controller utarm_api_server.launch arm_ip:="arm_ip_address"
roslaunch utra6_850_moveit_config run_with_utra6_850.launcharm_ip_address 부분에는 자신이 사용하는 컨트롤러의 ip를 넣고
utra 850이 아닌 다른 모델을 사용한다면 그게 맞게 모델 번호를 바꿔주면 됩니다.
정상적으로 켜진다면
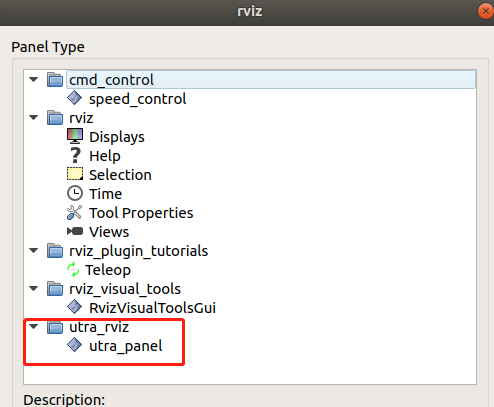
rviz 화면 상단에 panels→add new panel →utra_panel을 추가해줍니다.
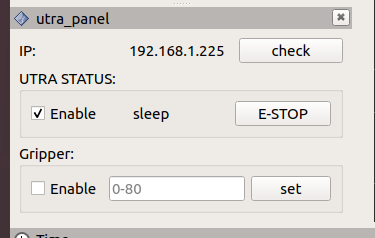
그리고 Enabled를 눌러 sleep으로 상태가 바뀌면 그 뒤부터 사용 가능합니다.
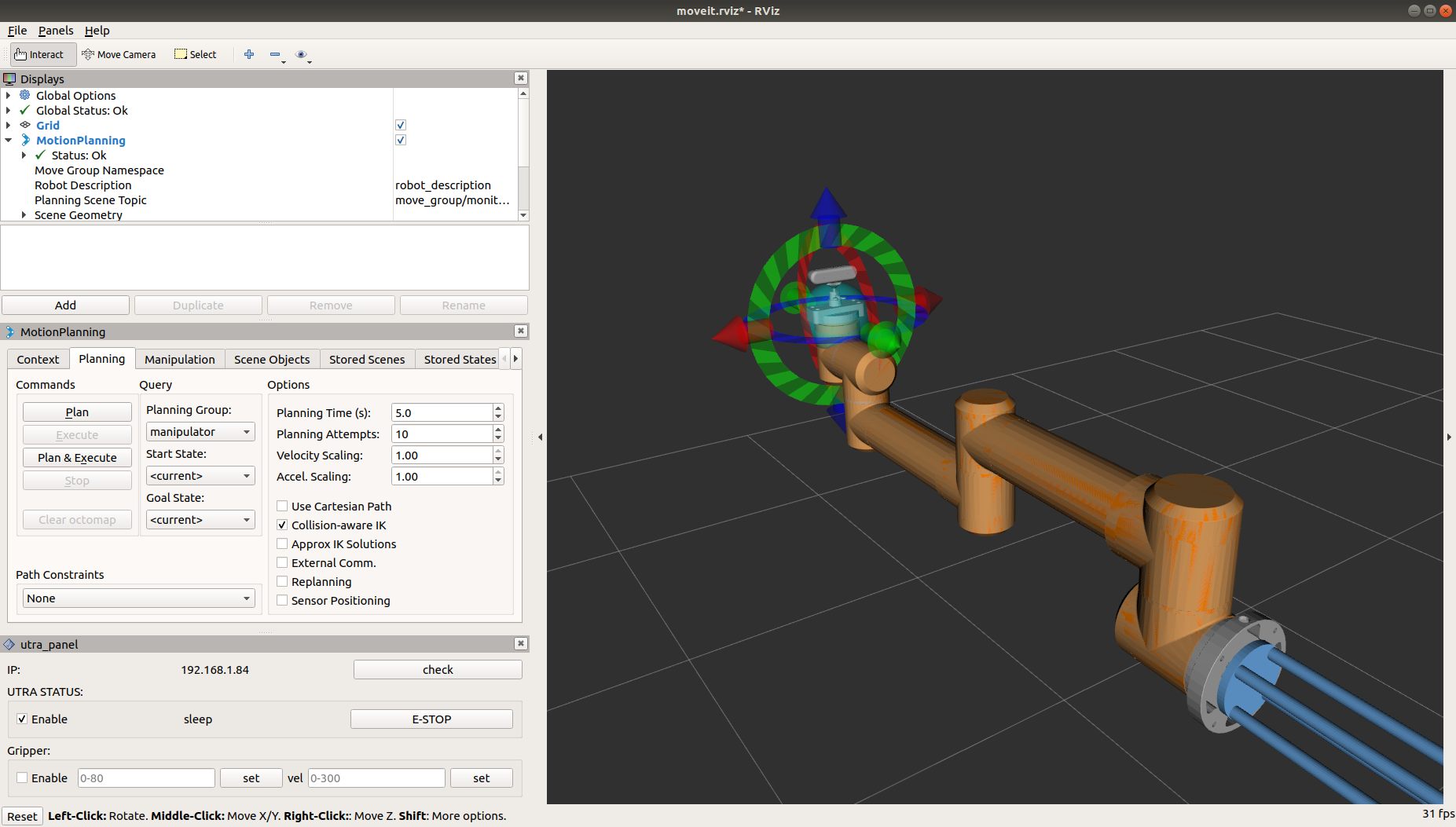
Rviz 실행 화면.
저는 테스트 베드 때문에 베이스 부분이 추가돼서 이렇고 실제로는 매니퓰레이터만 바닥에 붙어서 세워져 있습니다.
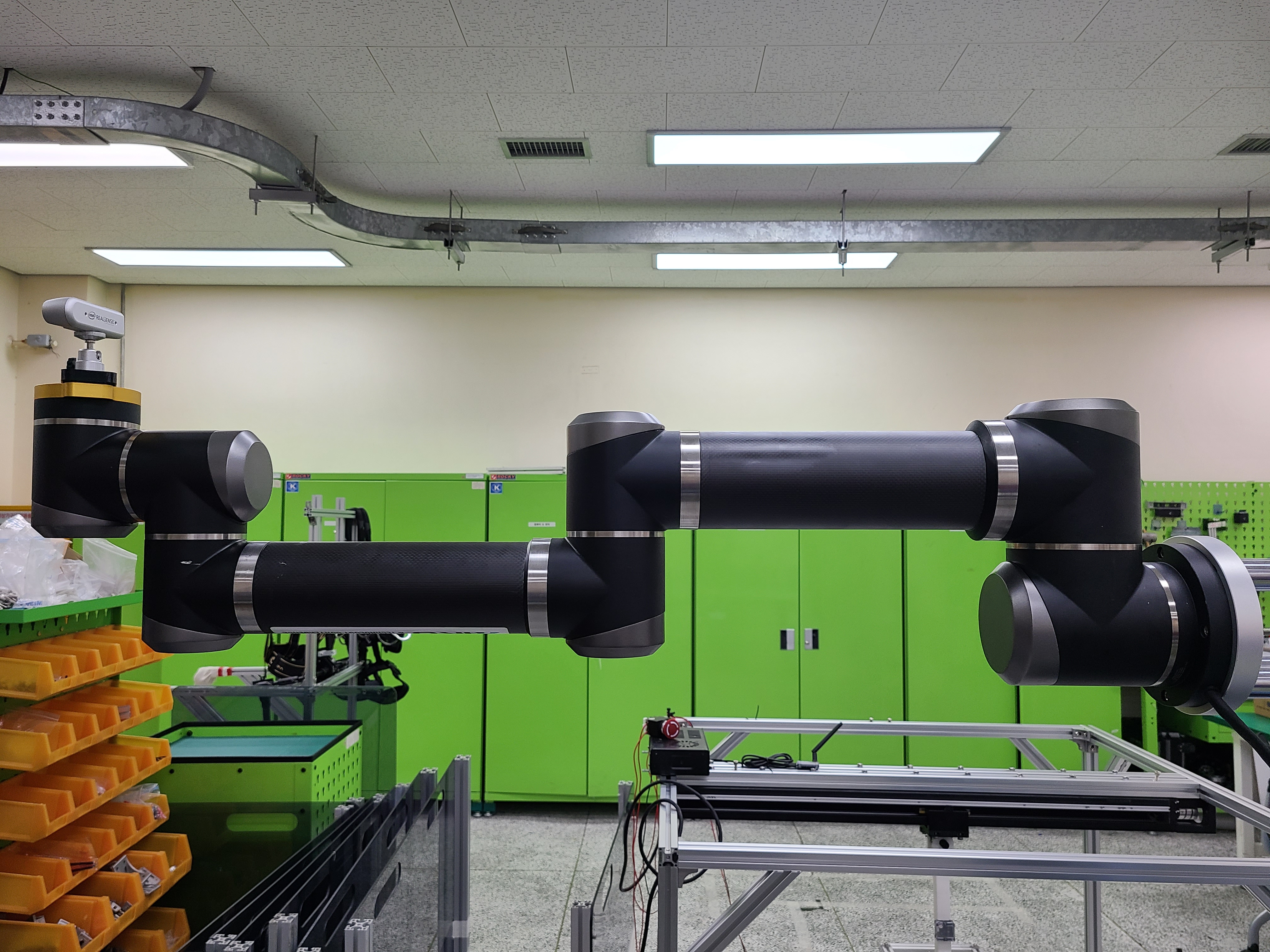
실제 매니퓰레이터 모습



댓글