
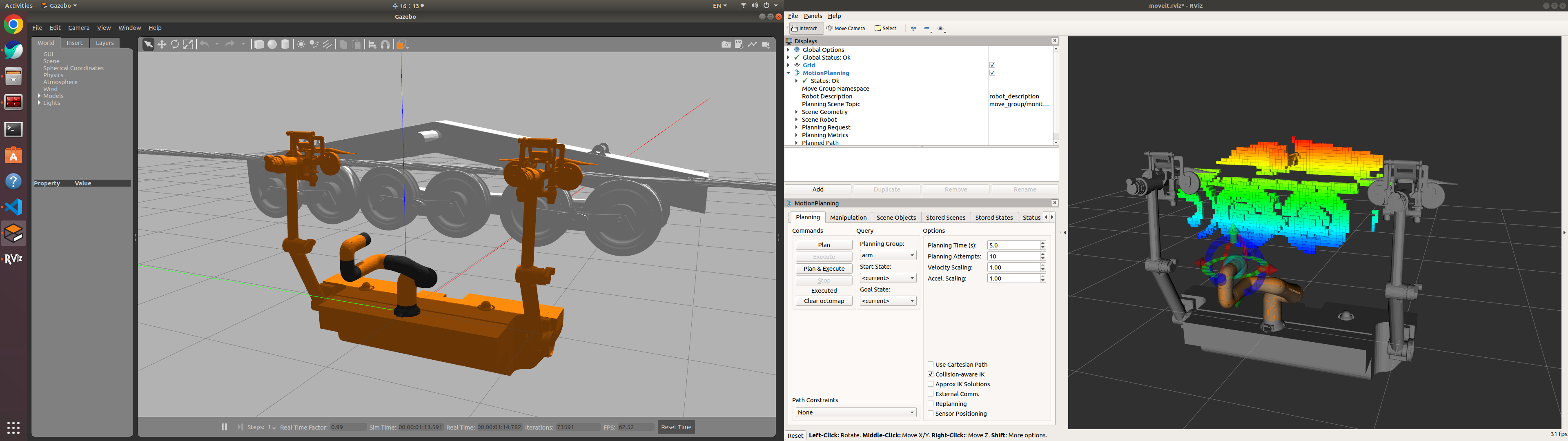
팔만 덩그러니 있던 친구에게

몸통을 달아줬습니다.
첫번째 문제 발생
로봇이 자기 자신을 인식하는 문제가 발생했습니다.
urdf에서 visual에는 로봇의 stl 파일을 넣어줬지만
collision에는 로봇이 다른 장애물과 부딪히지 않게 하기 위해 아주 작은 네모 박스를 임의로 넣어주었는데
collision에 작성한 부분이 실제 로봇이라 인식을 안 하고, 나머지는 다 장애물로 인식해서 발생한 문제입니다.
--> collision에도 stl파일을 넣어서 해결해줍니다.
또는 로봇보다 살짝 크게 직사각형이나 원통을 만들어주면 됩니다.
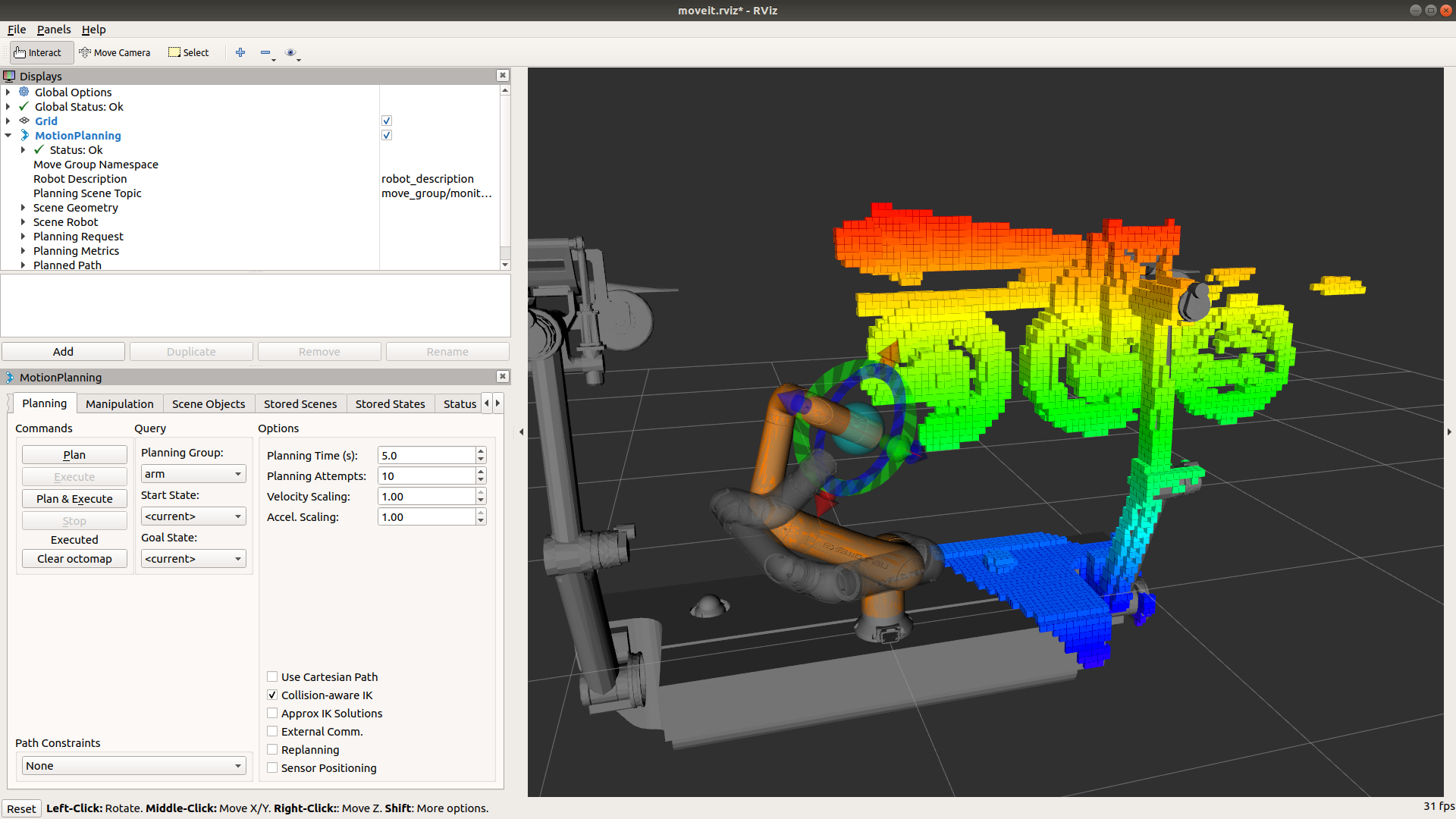
두번째 문제 발생

로봇 팔 사이에 있는 장애물 인식이 안 됩니다.

로봇 전체에 해당하는 stl파일을 collision에 넣으니
stl 형상대로 collision이 생겼다기보다는 로봇 전체를 감싸는 큰 네모가 collision 범위로 인식해서 뎁스카메라가 저 부분은 무시하고 그 밖에 있는 장애물만 인식하는 것 같았습니다.
하지만 저는 로봇팔 사이에 있는 장애물도 모두 인식해야 했기 때문에
--> 로봇 몸통부분과 양 옆은 팔을 따로 stl파일로 만들어 각각 링크를 만들어 fixed 조인트로 연결하여
로봇 중앙부분도 뎁스카메라가 인식할 수 있도록 수정했습니다.
드디어 잘 작동하네요 :)
'정나우 > ROS' 카테고리의 다른 글
| ros-realsense 오류 (1) | 2023.06.22 |
|---|---|
| Umbratek 사의 UTRA로봇을 ROS로 작동시키기 (0) | 2023.06.12 |
| [오류해결]ModuleNotFoundError: No module named 'netifaces' (0) | 2022.09.19 |
| [오류해결] ModuleNotFoundError: No module named 'defusedxml' (1) | 2022.09.19 |
| MoveIt!을 이용한 2-axis Prismatic joint Gazebo에서 구현하기 (0) | 2022.08.04 |


댓글