1. rqt를 이용하여 rosservice 값 받기
앞서 포스트한 글을 통해 Gazebo에서 매니퓰레이터가 달린 이동로봇을 불러온 뒤
rqt를 실행한 뒤 화면 좌상단에 Plugins/services/Service Caller를 클릭하면
Gazebo에서 주고 받을 수 있는 Request와 Response를 확인할 수 있다.
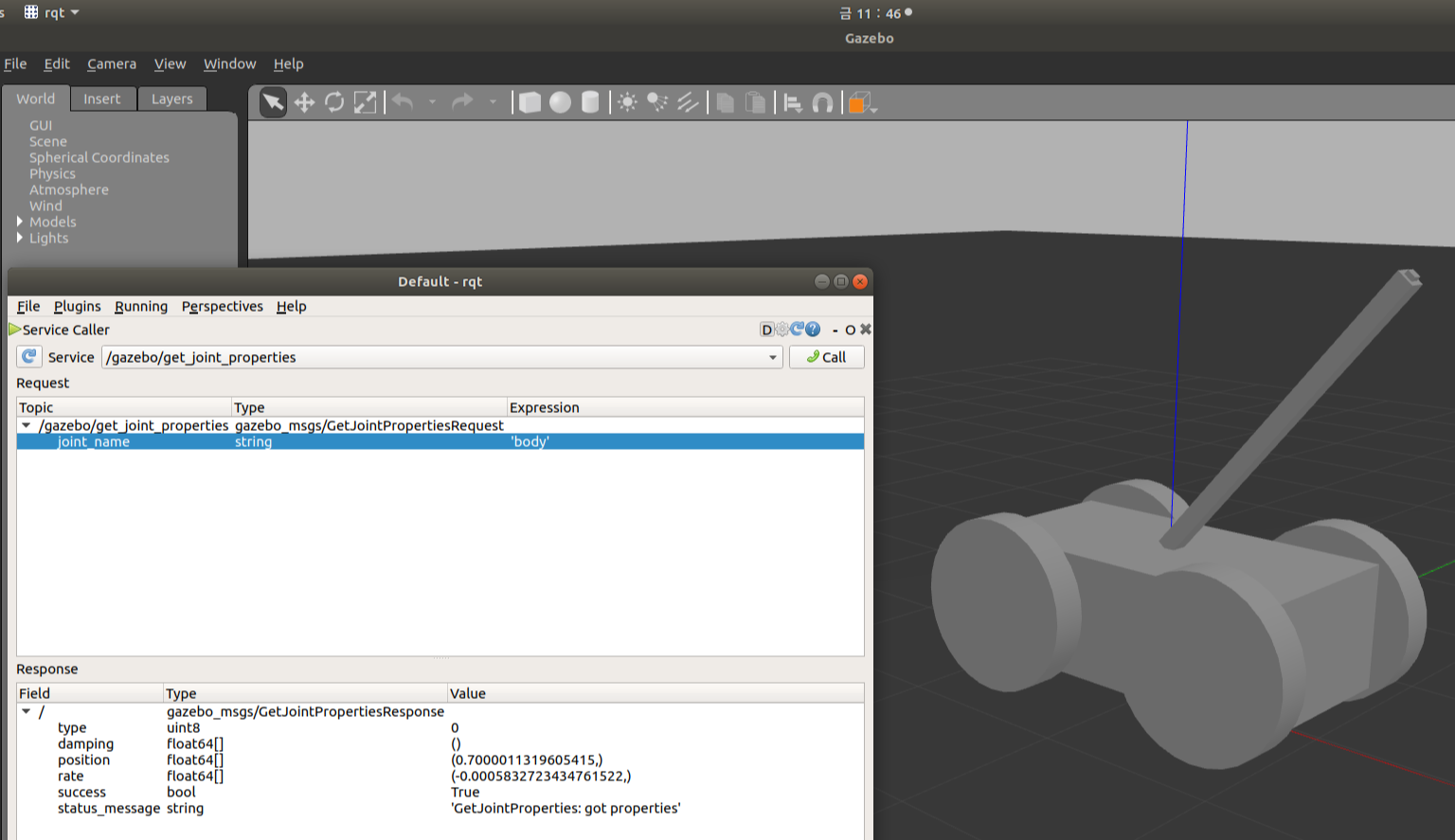
우리는 조인트 값을 받는게 목표이므로 Service에서 /gazebo/get_joint_properties를 선택하고 Call을 누르면
이 서비스에서 주고 받을 수 있는 Request와 Response를 알 수 있다.
Request에 있는 Joint name에 Expression에 본인이 값을 받고 싶은 조인트의 이름을 입력해준다.
필자는 조인트 이름이 Body이므로 '' --> 'Body'로 수정했다.
이렇게 한 뒤 Call을 누르면 가제보상의 Body이름을 가진 조인트의 position 값을 받을 수 있다.
2. 터미널 상에서 Joint_position 값 받기
터미널 창에 다음과 같은 명령어를 입력한다.
rosservice call /gazebo/get_joint_properties 'body'
이를 통해 좀전에 rqt에서 봤던 Response 내용들을 확인할 수 있다.
하지만 우리는 이런 방식이 아닌 코드 안에서 service 값을 직접 불러봐야 한다.
3. 코드를 작성해서 joint_position 값 받기
기존의 teleop_twist_keyboard.cpp 파일을 토대로 하고, 다음 사이트를 참고하면서 코드를 작성해보았다.
https://www.cse.sc.edu/~jokane/agitr/agitr-small-service.pdf
3-1. teleop_twist_keyboard_cpp 파일 수정
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
#include <stdio.h>
#include <unistd.h>
#include <termios.h>
#include <map>
#include <gazebo_msgs/GetJointProperties.h>
#include <unistd.h>
int main(int argc, char** argv)
{
// Init ROS node
ros::init(argc, argv, "teleop_twist_keyboard");
ros::NodeHandle nh;
// Init cmd_vel publisher
ros::Publisher pub = nh.advertise<geometry_msgs::Twist>("cmd_vel", 1);
// Create Twist message
geometry_msgs::Twist twist;
//새로 추가된 부분
ros::ServiceClient gazebo_Client = nh.serviceClient<gazebo_msgs::GetJointProperties>
("gazebo/get_joint_properties");
gazebo_msgs::GetJointProperties::Request req;
gazebo_msgs::GetJointProperties::Response resp;
req.joint_name = "link_joint";
while(true){
bool success = gazebo_Client.call(req, resp);
if(success) {
ROS_INFO("\rJoint position is %f", resp.position[0]);
} else {
ROS_ERROR("\rfailed to spawn");
}
// Publish it and resolve any remaining callbacks
pub.publish(twist);
ros::spinOnce();
}
return 0;
}
코드 윗 부분에서
#include <gazebo_msgs/GetJointProperties.h>가 추가 되었고
main문 안에서는
ros::ServiceClient gazebo_Client = nh.serviceClient<gazebo_msgs::GetJointProperties>
("gazebo/get_joint_properties");
gazebo_msgs::GetJointProperties::Request req;
gazebo_msgs::GetJointProperties::Response resp;
req.joint_name = "link_joint";다음과 같은 코드를 통해 조인트값을 rosservice로 받을 수 있다.
while문에서는
while(true){
bool success = gazebo_Client.call(req, resp);
if(success) {
ROS_INFO("\rJoint position is %f", resp.position[0]);
} else {
ROS_ERROR("\rfailed to spawn");
}
// Publish it and resolve any remaining callbacks
pub.publish(twist);
ros::spinOnce();
}를 통해 받은 받은 터미널상에서 print할 수 있다.
3-2. CMakeLists.txt 파일 수정
CMakeLists.txt파일은
cmake_minimum_required(VERSION 2.8.3)
project(teleop_twist_keyboard_cpp)
find_package(catkin REQUIRED COMPONENTS
roscpp
geometry_msgs
)
catkin_package(
INCLUDE_DIRS src
CATKIN_DEPENDS roscpp geometry_msgs
)
include_directories(${catkin_INCLUDE_DIRS})
add_executable(teleop_twist_keyboard src/teleop_twist_keyboard.cpp)
target_link_libraries(teleop_twist_keyboard ${catkin_LIBRARIES})
set(CMAKE_CXX_FLAGS "-std=c++11 ${CMAKE_CXX_FLAGS}")다음과 같이 수정을 해주었다.
아마 기존의 파일에서
add_executable(teleop_twist_keyboard src/teleop_twist_keyboard.cpp)이 부분만 추가했던걸로 기억함..
3-3. Package.xml 파일 수정
그리고 packge.xml 파일도
<?xml version="1.0"?>
<package format="2">
<name>teleop_twist_keyboard_cpp</name>
<version>0.0.0</version>
<description>Generic keyboard teleop for twist robots (in C++)! Based off of the teleop_twist_keyboard Python ROS node.</description>
<author email="methyldragon@gmail.com">methylDragon</author>
<maintainer email="methyldragon@gmail.com">methylDragon</maintainer>
<url type="website">http://github.com/methylDragon</url>
<url>http://www.ros.org/wiki/teleop_twist_keyboard_cpp</url>
<license>MIT</license>
<buildtool_depend>catkin</buildtool_depend>
<build_depend>roscpp</build_depend>
<build_depend>geometry_msgs</build_depend>
<build_export_depend>roscpp</build_export_depend>
<build_export_depend>geometry_msgs</build_export_depend>
<exec_depend>roscpp</exec_depend>
<exec_depend>geometry_msgs</exec_depend>
</package>다음처럼 작성해준다. 수정한 부분이 있었는지 기존의 것을 그대로 썼는지 기억이 잘 안 나서 일단 올린다.
3-3. 빌드 후 실행
cd ..
cd catkin_ws
catkin build
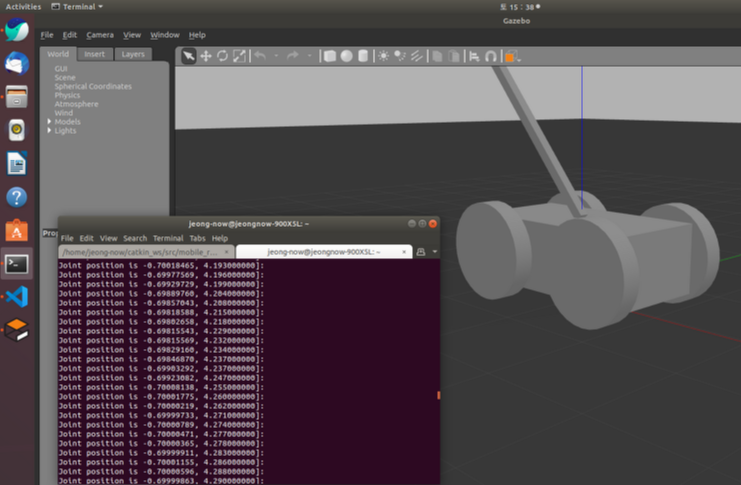
roslaunch mobile_robot mobile_robot_gazebo.launch
rosrun teleop_twist_keyboard_cpp teleop_twist_keyboard사진처럼 0.01초 간격으로 조인트 값이 나오면 잘 작동하는 것이다.
'정나우 > ROS' 카테고리의 다른 글
| DQN을 활용한 Cartpole 문제 풀기 (0) | 2022.04.12 |
|---|---|
| [에러 해결] sudo-apt get update가 안 될 때 (1) | 2022.04.10 |
| [ROS] Gazebo상에서 joint_position rosservice값으로 로봇 PID제어하기 (0) | 2022.03.05 |
| ROS URDF로 이동로봇 위에 매니퓰레이터 만들기 + imu센서 달기 (0) | 2022.01.22 |
| ROS URDF로 이동로봇 만들기 (1) | 2022.01.09 |



댓글